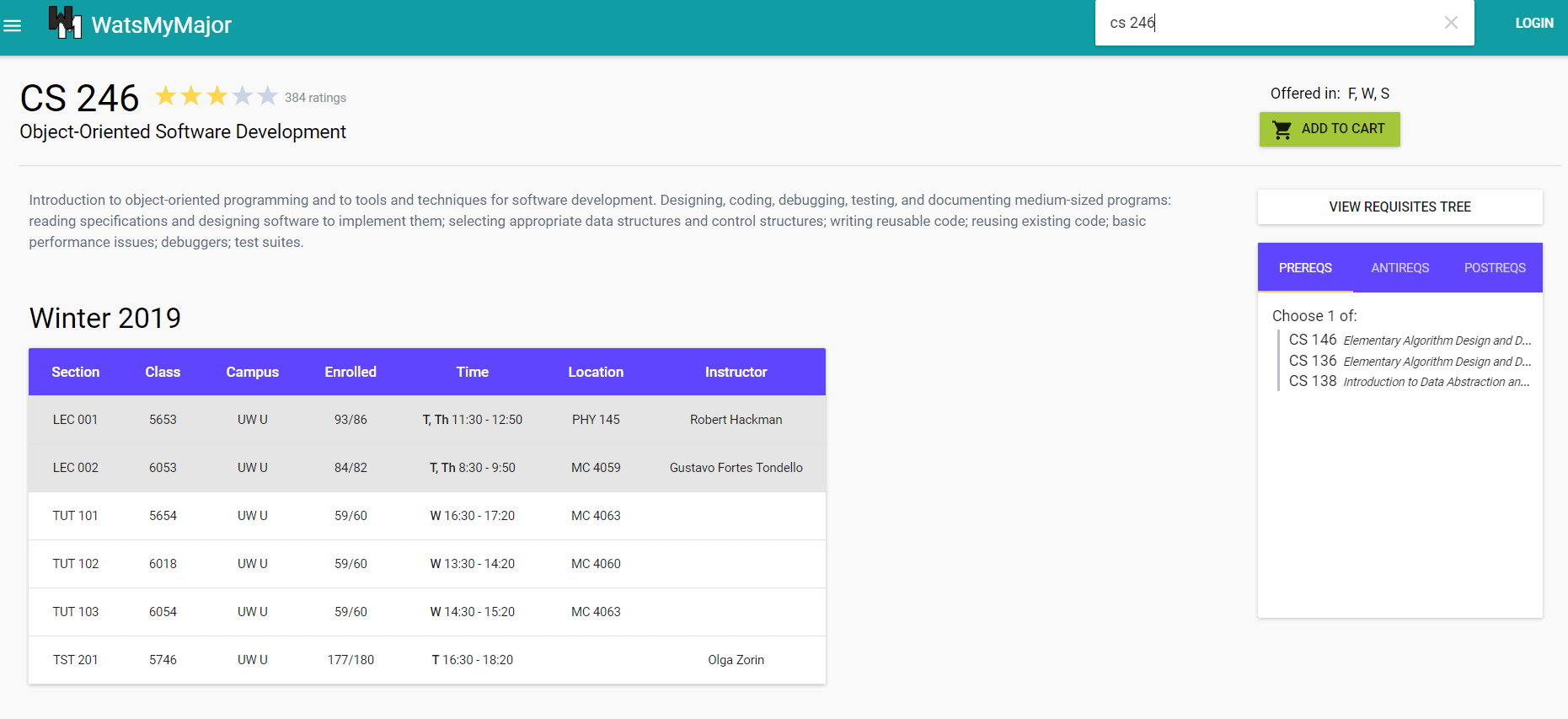
Side project to help UWaterloo students plan out their courses, potentially saving them thousands of dollars!
#Node.js
#React.js
Raphael Koh
⟨ Software Engineer | Quantum Physicist ⟩
I'm a passionate Software Engineer and aspiring
Quantum Physicist. I love working on side projects,
such as apps and educational tools in my spare time. My passion for both
computer science and quantum physics has brought me to the field of quantum computing!
Current software interests: distributed systems, concurrent/parallel programming, and backend system design.
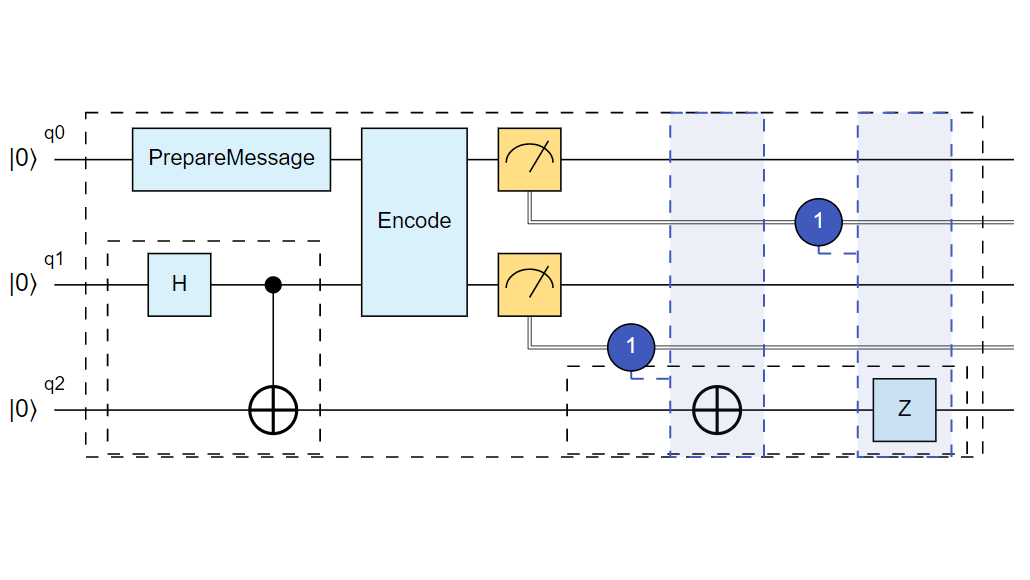
Current research interests: quantum machine learning, quantum complexity theory, quantum information theory, and quantum error correction.